台州智能搬运机械手
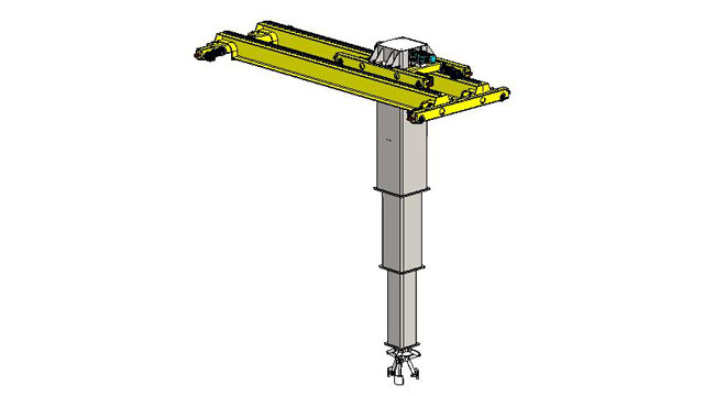
一、搬运机械手简介:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成。 二、产品特点:1.各轴方向以极高的速度直线运行,可用伺服电机快速响应;2.连续工作时间长;3.定位精度可达0.02mm;4.重型工件的码垛、上下料及工件的翻转(如果需要)的搬运; 5.各机构均设有限位装置(机电双限位)、刹车装置、超载极限保护装置;6.气动抓取机械手设有断气保护装置,防超程装置等;7.误操作保护装置。三、搬运机械手产品构成:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成;X轴方向运行机构,采用齿轮细条传动,传感器检测元件+机械限位;Z轴方向运行机构,采用全封闭减速电机角型轮传动+齿轮齿条传动,传感器检测元件+机械限位;Y轴方向升降机构,采用带式传动,传感器检测元件+机械限位;气动抓取机械手,采用双爪气动动力装置,实现机械手的开闭,爪指采用内爪式,传感器检测元件+机械限位;控制系统,通过PLC全自动控制,采集各传感器或按钮的输入信号,发送指令给个执行元件按既定动作去执行。南京搬运机械手,南京高锐特有限公司。台州智能搬运机械手
一、搬运机械手简介:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成。 二、产品特点:1.各轴方向以极高的速度直线运行,可用伺服电机快速响应;2.连续工作时间长;3.定位精度可达0.02mm;4.重型工件的码垛、上下料及工件的翻转(如果需要)的搬运;5.各机构均设有限位装置(机电双限位)、刹车装置、超载极限保护装置;6.气动抓取机械手设有断气保护装置,防超程装置等;7.误操作保护装置。台州智能搬运机械手三坐标搬运机械手,气动抓手,PLC控制。南京高锐特起重机械有限公司生产。
一、 搬运机械手简介:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成。二、产品特点:1.各轴方向以极高的速度直线运行,可用伺服电机快速响应;2.连续工作时间长;3.定位精度可达0.02mm;4.重型工件的码垛、上下料及工件的翻转(如果需要)的搬运;5.各机构均设有限位装置(机电双限位)、刹车装置、超载极限保护装置;6.气动抓取机械手设有断气保护装置,防超程装置等;7.误操作保护装置。三、搬运机械手产品构成:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成;X轴方向运行机构,采用齿轮细条传动,传感器检测元件+机械限位;Z轴方向运行机构,采用全封闭减速电机角型轮传动+齿轮齿条传动,传感器检测元件+机械限位;Y轴方向升降机构,采用带式传动,传感器检测元件+机械限位;气动抓取机械手,采用双爪气动动力装置,实现机械手的开闭,爪指采用内爪式,传感器检测元件+机械限位;控制系统,通过PLC全自动控制,采集各传感器或按钮的输入信号,发送指令给个执行元件按既定动作去执行。
一、搬运机械手简介:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成。 二、产品特点:1.各轴方向以极高的速度直线运行,可用伺服电机快速响应;2.连续工作时间长;3.定位精度可达0.02mm;4.重型工件的码垛、上下料及工件的翻转(如果需要)的搬运;5.各机构均设有限位装置(机电双限位)、刹车装置、超载极限保护装置; 6.气动抓取机械手设有断气保护装置,防超程装置等;7.误操作保护装置。三、搬运机械手产品构成:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成;X轴方向运行机构,采用齿轮细条传动,传感器检测元件+机械限位;Z轴方向运行机构,采用全封闭减速电机角型轮传动+齿轮齿条传动,传感器检测元件+机械限位;Y轴方向升降机构,采用带式传动,传感器检测元件+机械限位;气动抓取机械手,采用双爪气动动力装置,实现机械手的开闭,爪指采用内爪式,传感器检测元件+机械限位;控制系统,通过PLC全自动控制,采集各传感器或按钮的输入信号,发送指令给个执行元件按既定动作去执行。三坐标搬运机械手,PLC控制,性能好。
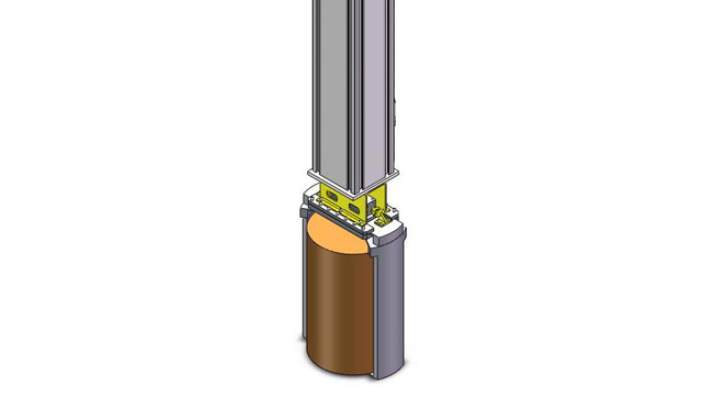
一、搬运机械手简介:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成。 二、产品特点:1.各轴方向以极高的速度直线运行,可用伺服电机快速响应;2.连续工作时间长;3.定位精度可达0.02mm;4.重型工件的码垛、上下料及工件的翻转(如果需要)的搬运;5.各机构均设有限位装置(机电双限位)、刹车装置、超载极限保护装置;6.气动抓取机械手设有断气保护装置,防超程装置等;7.误操作保护装置。 三、搬运机械手产品构成:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、 Z轴升降机构、 抓取机械手、导电系统及控制系统等组成;X轴方向运行机构,采用齿轮细条传动,传感器检测元件+机械限位;Z轴方向运行机构,采用全封闭减速电机角型轮传动+齿轮齿条传动,传感器检测元件+机械限位;Y轴方向升降机构,采用带式传动,传感器检测元件+机械限位;气动抓取机械手,采用双爪气动动力装置,实现机械手的开闭,爪指采用内爪式,传感器检测元件+机械限位;控制系统,通过PLC全自动控制,采集各传感器或按钮的输入信号,发送指令给个执行元件按既定动作去执行。三坐标搬运机械手,自动化程度高,南京生产。销售搬运机械手厂家
三坐标搬运机械手,PLC控制。南京生产。台州智能搬运机械手
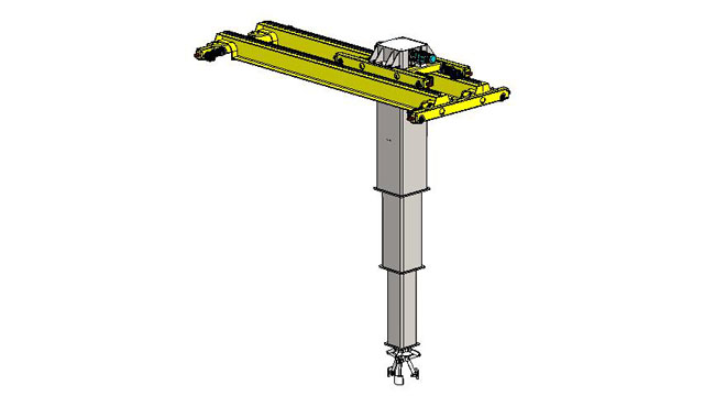
一、搬运机械手简介:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成。 二、产品特点:1.各轴方向以极高的速度直线运行,可用伺服电机快速响应;2.连续工作时间长;3.定位精度可达0.02mm;4.重型工件的码垛、上下料及工件的翻转(如果需要)的搬运;5.各机构均设有限位装置(机电双限位)、刹车装置、超载极限保护装置;6.气动抓取机械手设有断气保护装置,防超程装置等;7.误操作保护装置。 三、搬运机械手产品构成:三坐标搬运机械手由钢结构架、X轴运行机构、Y轴运行机构、Z轴升降机构、抓取机械手、导电系统及控制系统等组成;X轴方向运行机构,采用齿轮细条传动,传感器检测元件+机械限位;Z轴方向运行机构, 采用全封闭减速电机角型轮传动+齿轮齿条传动,传感器检测元件+机械限位;Y轴方向升降机构,采用带式传动,传感器检测元件+机械限位;气动抓取机械手,采用双爪气动动力装置,实现机械手的开闭,爪指采用内爪式,传感器检测元件+机械限位;控制系统,通过PLC全自动控制,采集各传感器或按钮的输入信号,发送指令给个执行元件按既定动作去执行。台州智能搬运机械手
本文来自亿百官网(中国)股份有限公司:/Article/11e799195.html

中国益生元饮品
益生元是一种能够促进肠道健康的营养素,它能够通过增加肠道中有益菌的数量和种类来改善肠道微生态环境。益生元的成分种类繁多,常见的包括低聚果糖、菊粉、乳寡糖等。这些成分在肠道中能够被有益菌利用,从而促进它 。
掐丝珐琅,通吃东西方名流的技艺你听过“景泰蓝”吧?很多人把“景泰蓝”直接理解为“掐丝珐琅”,其实不准。景泰蓝的标准名称叫“铜胎掐丝珐琅”,是把柔软的扁铜丝掐成的各种花纹焊在铜质胎型上,填入珐琅质的色釉 。
共板法兰风管施工工艺:a.风管在加工时,共板法兰的用料长度即剪角长度为61~62mm,剪角的宽度根据实际使用的板材厚度及咬口的加工方式:如联合角咬口预留量为30mm、按扣式咬口预留量为31mm来确定, 。
气动阀门是指通过压缩空气的作用驱动活塞、膜片等部件运动来实现流体控制的一种阀门。在工业自动化领域中,气动阀门具有很多的应用场景和发展前景。气动阀门的工作原理是利用压缩空气或其他气体推动阀门进行开闭。通 。
工程机械发展比较快,特别是近几年物流发展比较快,带动了物流仓储业的快速发展,以叉车为主的仓储设备、升降设备发展比较快,如全电动堆高车、半电动堆高车、全电动搬运车、手动搬运车、手动堆高车、汽车尾板、升降 。
吊车租赁市场已经成熟并且运转良好,但在城市的吊车租赁行业,仍然可以看到一些经济纠纷。对于我们来说,想要避免出现经济纠纷,了解一些吊车租赁过程中的注意事项,就很有必要了。1、起重重量各项目对吊车的吨位和 。
热熔胶可以在各种不同的温度下使用。无论是在极寒的冬天还是在炎热的夏天,热熔胶都可以正常工作。这使得它成为一个非常适合在各种不同环境下使用的粘合剂。热熔胶可以在不同的表面上使用。无论是光滑的表面还是粗糙 。
就是把骨灰镶嵌在墙壁里,墙体正面分布着井字形的格子,格位口用石材封死,然后石材的表面就当作墓碑,然后刻上碑文。一般来说一堵壁葬墙可以安置几百个的骨灰盒,在如今土地资源稀缺且盛行火葬的现状下,其占地小空 。
催化燃烧设备的工作温度范围通常取决于所使用的催化剂和反应条件。一般来说,催化燃烧设备的工作温度范围在200°C至500°C之间,很常见的温度范围是250°C至400°C。此外,催化剂的类型和质量也对催 。
蒸发式冷凝机充分利用水的汽化潜热,一般的水冷式冷凝机每1Kg冷却水能带走16.75~25.12KJ热量,而1Kg水在常温下蒸发能带走约2428KJ热量,因而蒸发式冷凝机理论耗水量只为水冷式冷凝机的1% 。
气动法兰式隔膜阀是一种应用于工业流体控制领域的阀门,它结合了气动操作和法兰连接的优点。这种阀门的结构紧凑,使用灵活,维护方便,并且具有较好的密封性能。气动法兰式隔膜阀主要由阀体、膜片和气动执行机构等部 。